6 legs walking linkage robot
今次繪製的,進階版的四足連杆機械人,目的是希望大家熟習做用fusion360的joint功能
Step 1
💡首先開一個新檔, 只繪製一邊, 另一邊之後可以再開另一個檔, 用insert derive, 可避免分層後joint消失的問題
Step 2
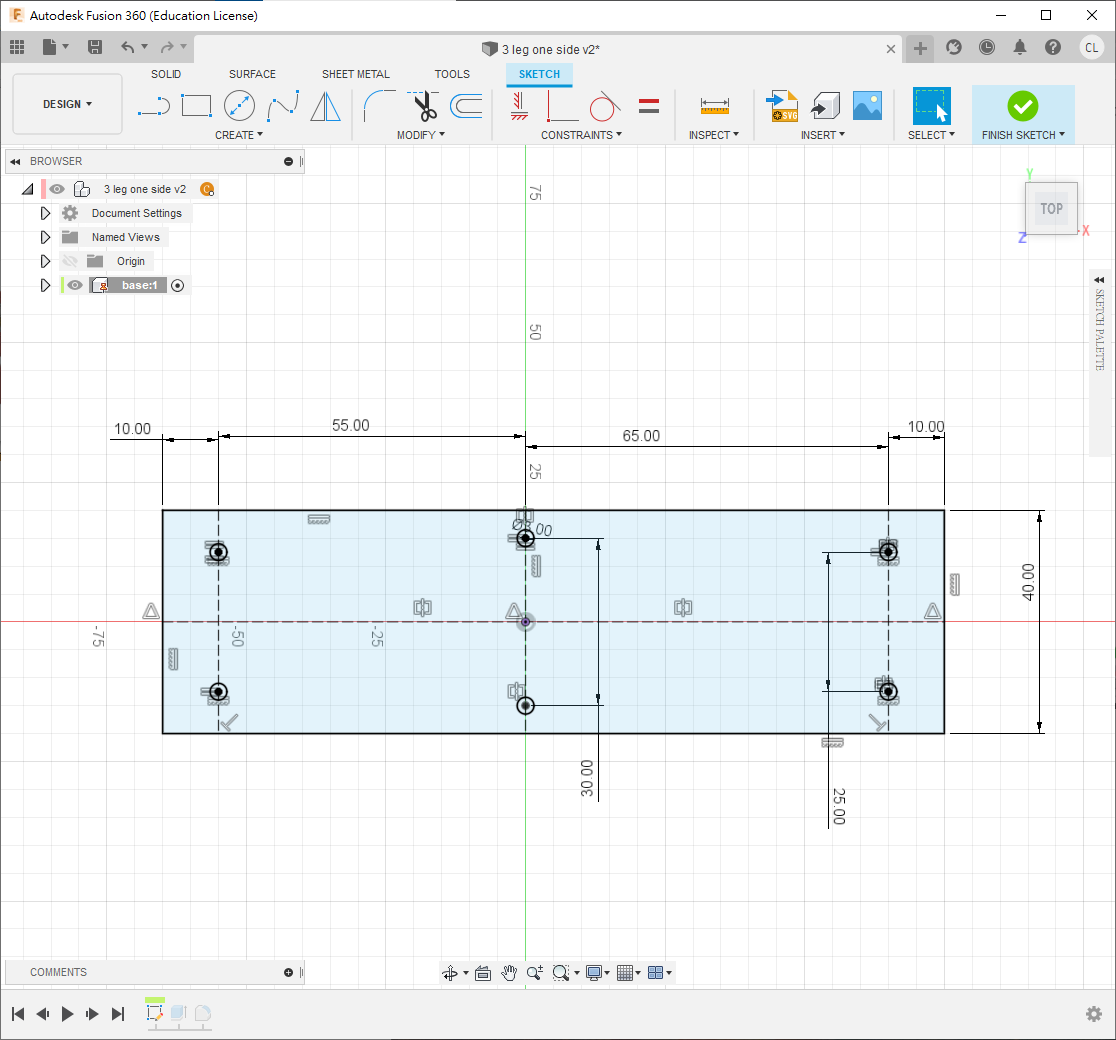
開一個新的component叫
base記得小黑點按了進了activate
開一個
new sketch如圖尺寸繪製
用
s搜尋"change parameter, 開一個新的variable叫thickness,內容為3mm將sketch用
e擠出thickness厚度, 之後四邊fillet 3mm
Step 3
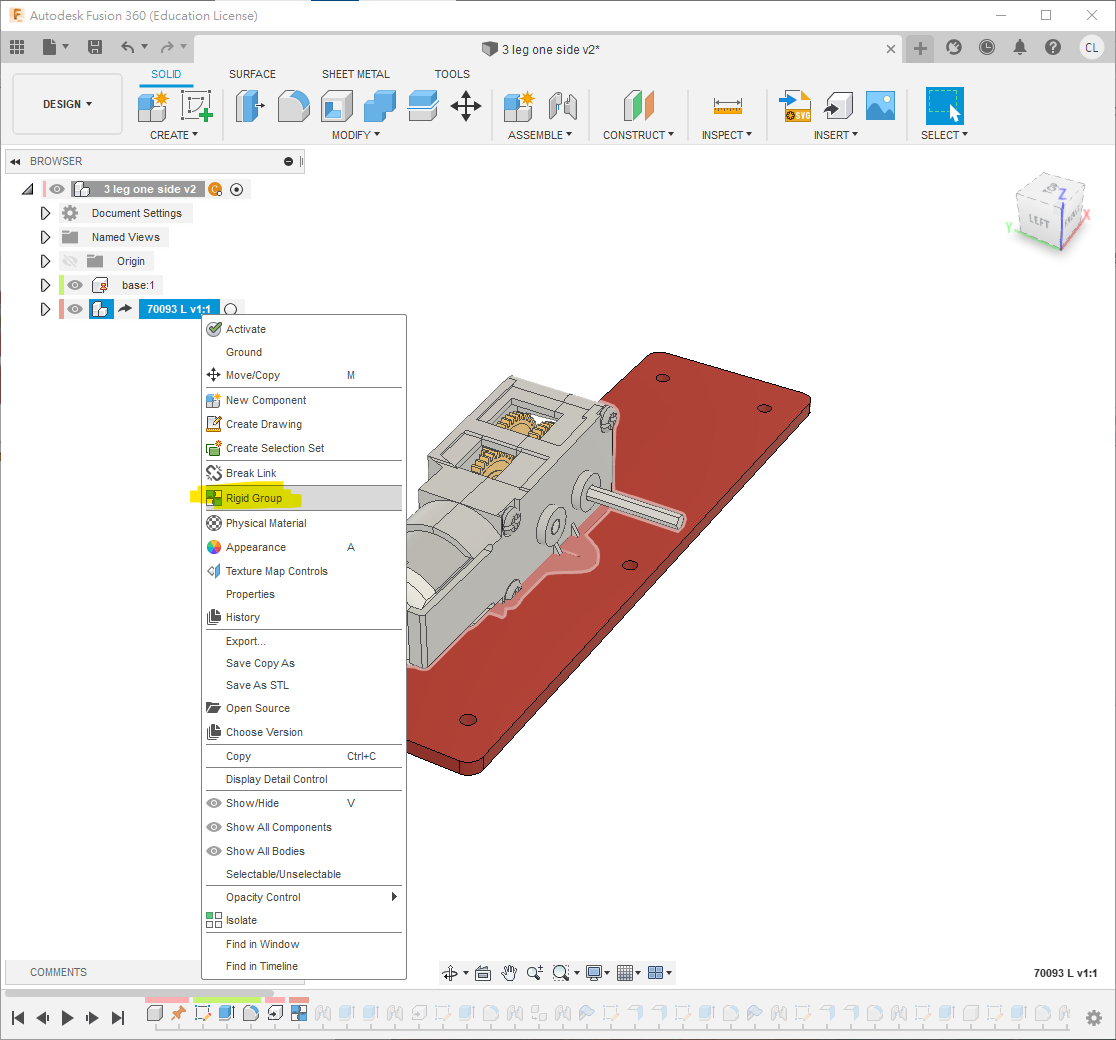
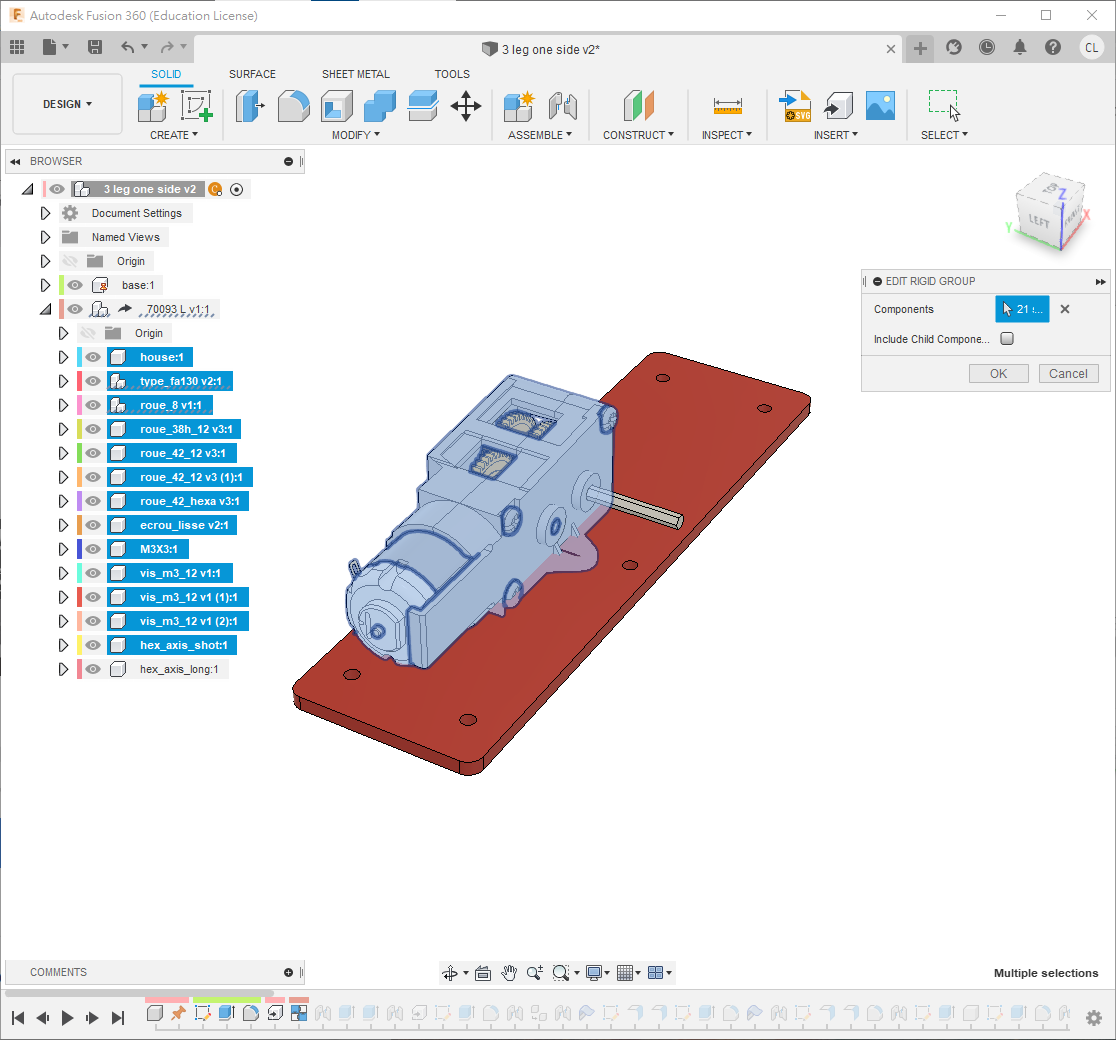
下一步用"
insert derive", derive一個70093 gearbox的step檔在70093按右鍵, 找到rigid group
今次不是選擇全部, 按住ctrl鍵, 選擇除最長軸外的全部齒輪, 馬達與外殼
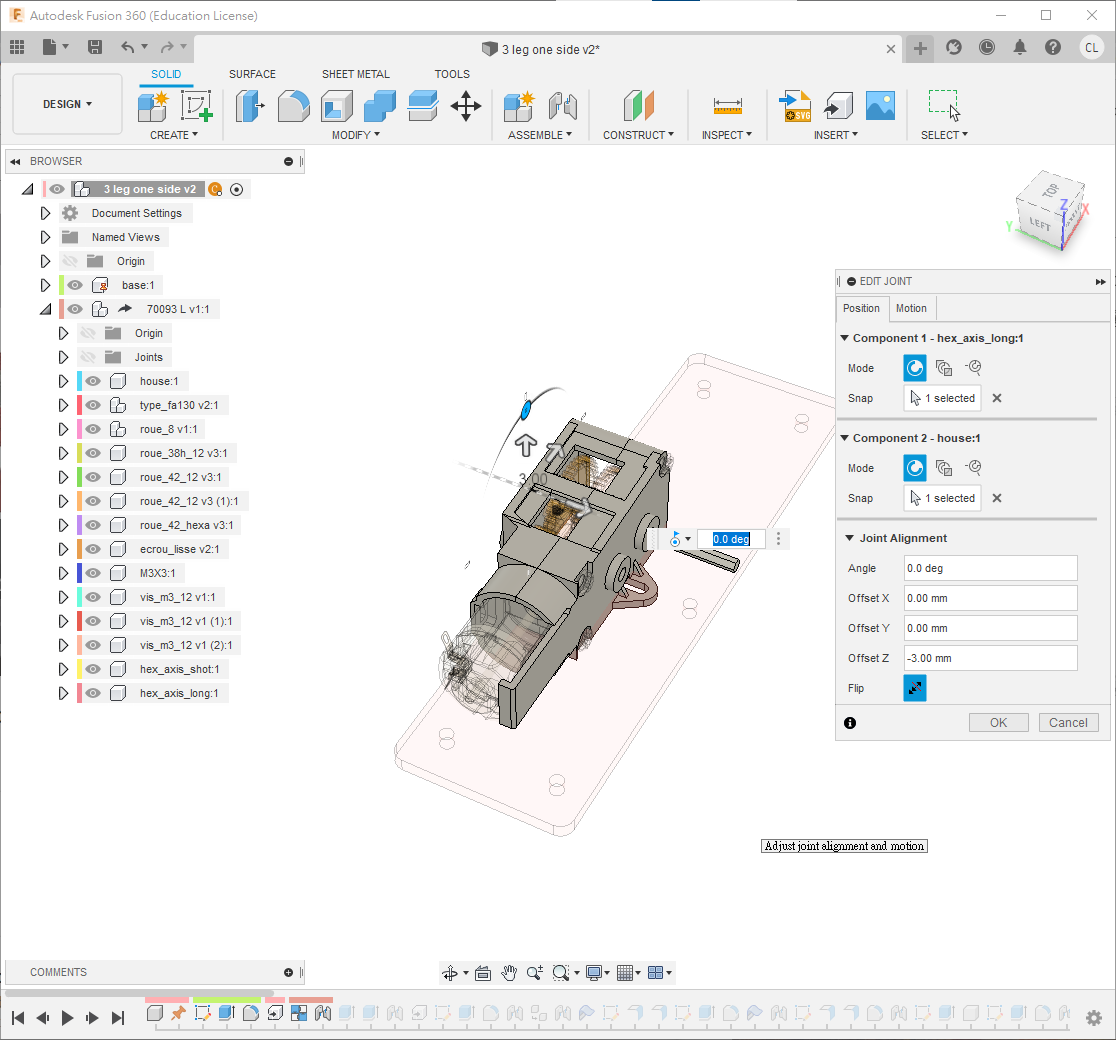
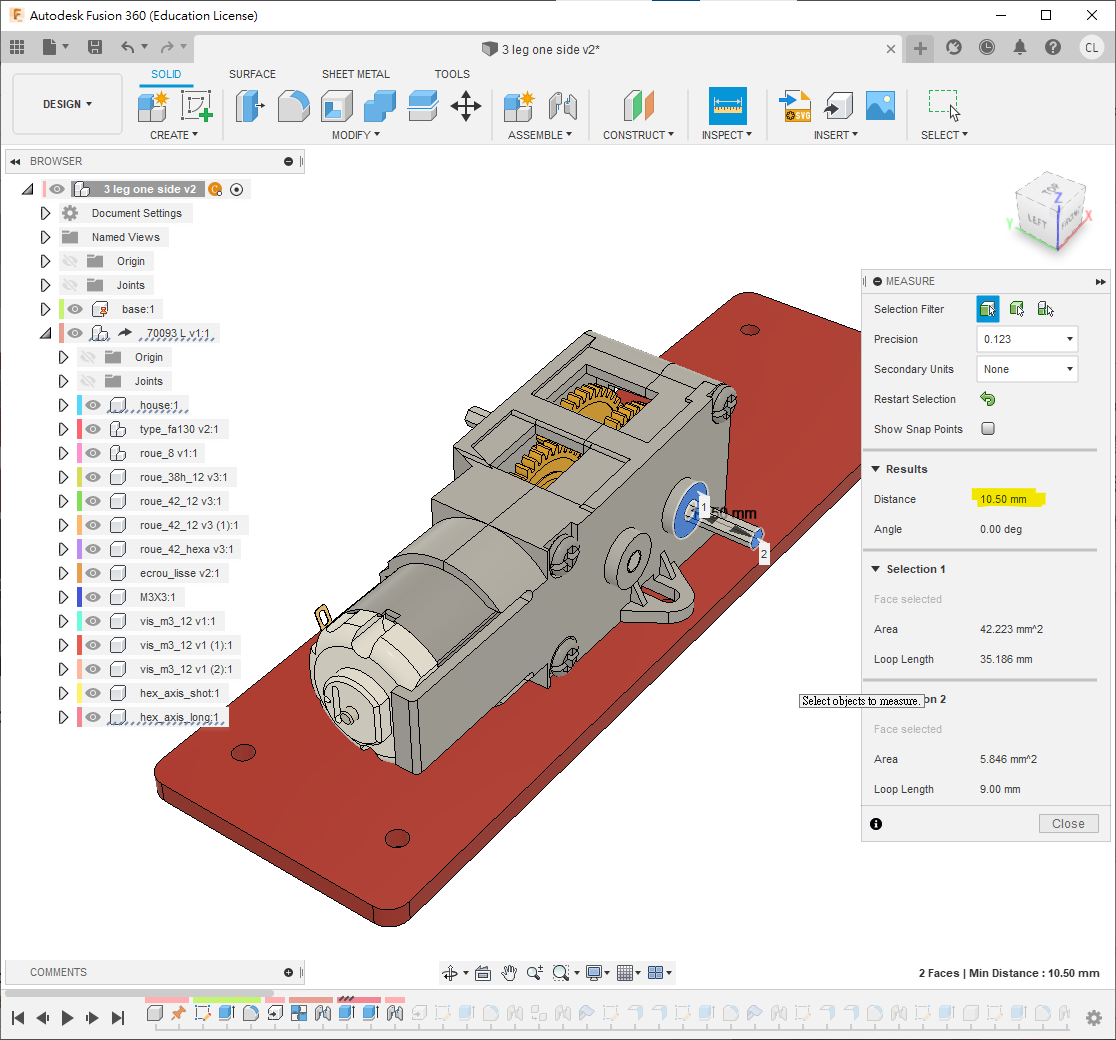
剩下的長軸則用revolving joint, 組合到外殼中
最後將長軸兩邊用
e增長/縮短至距離外殼10.5mm(兩邊都是10.5mm)
Step 4
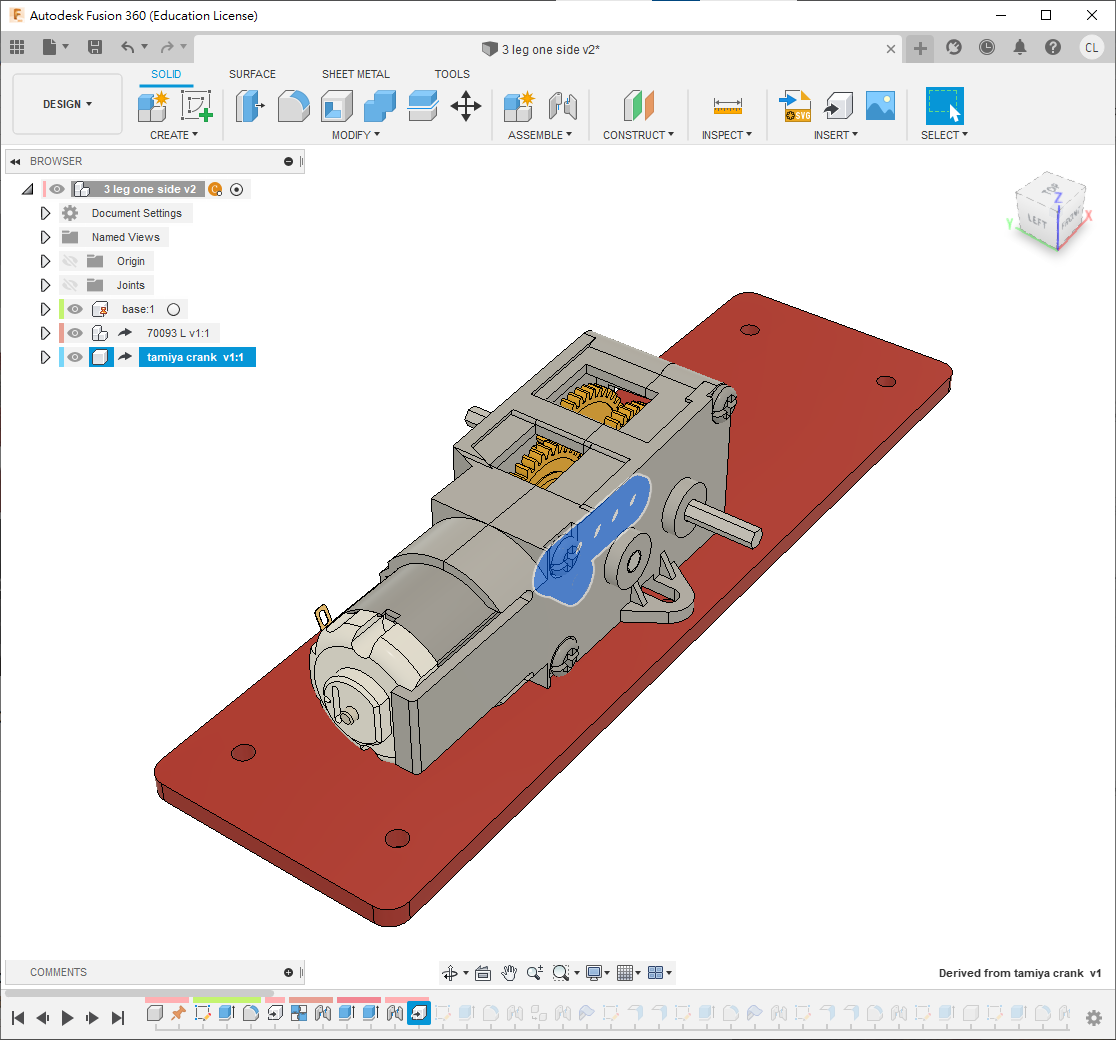
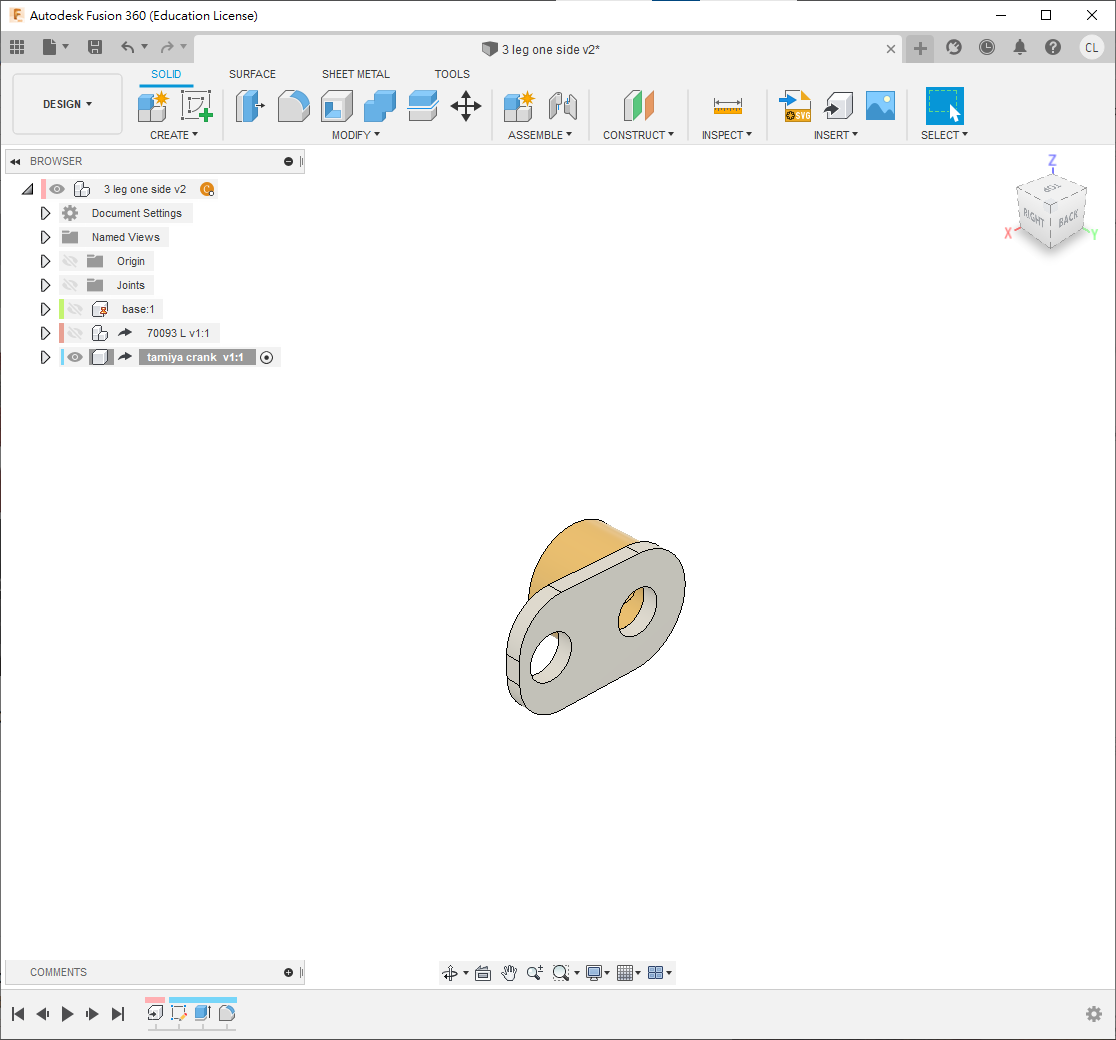
用
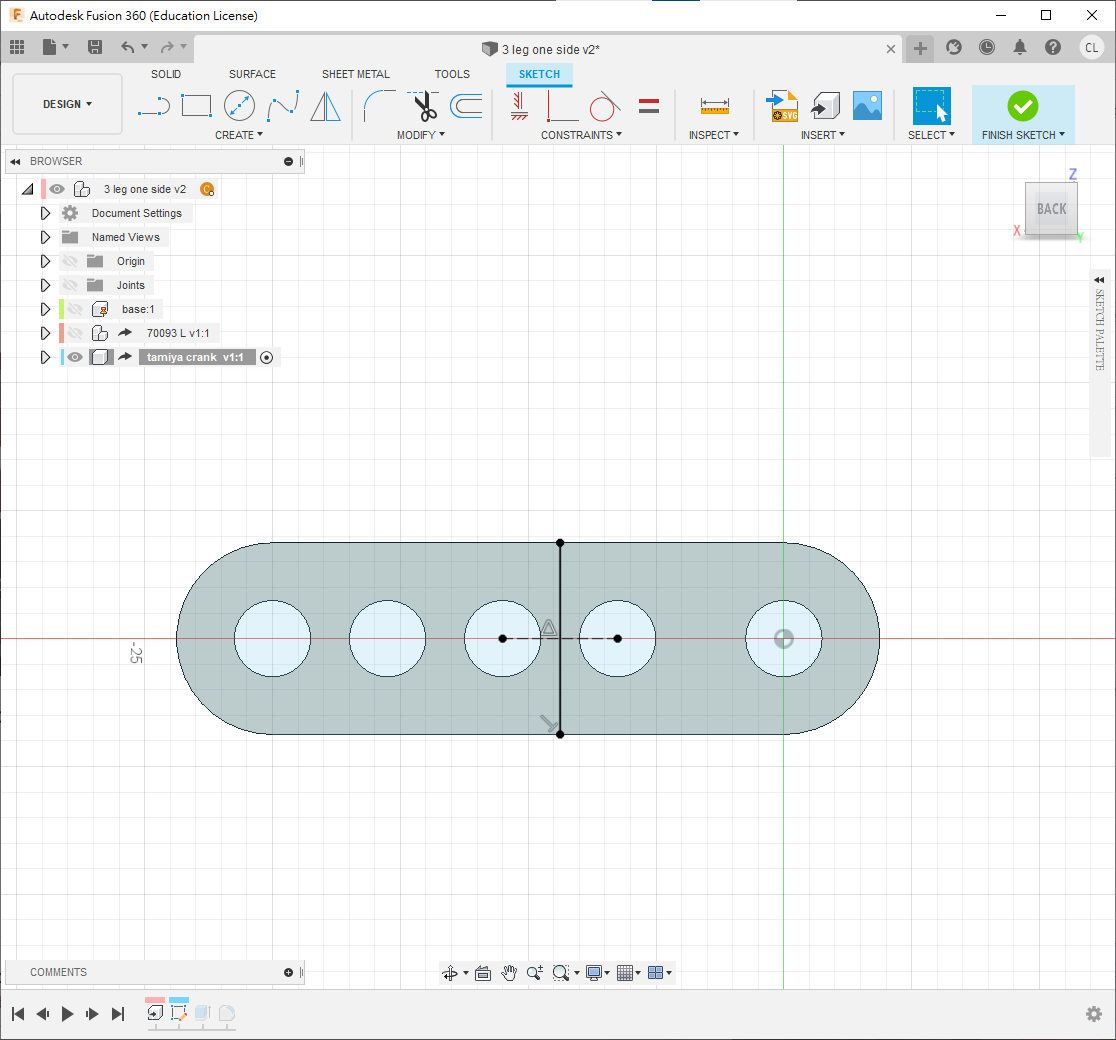
insert derivederive一個tamiya crank的檔在曲柄表面上開一個new sketch, 尺寸如下圖
用
e將多餘部分刪走並fillet 3 mm用
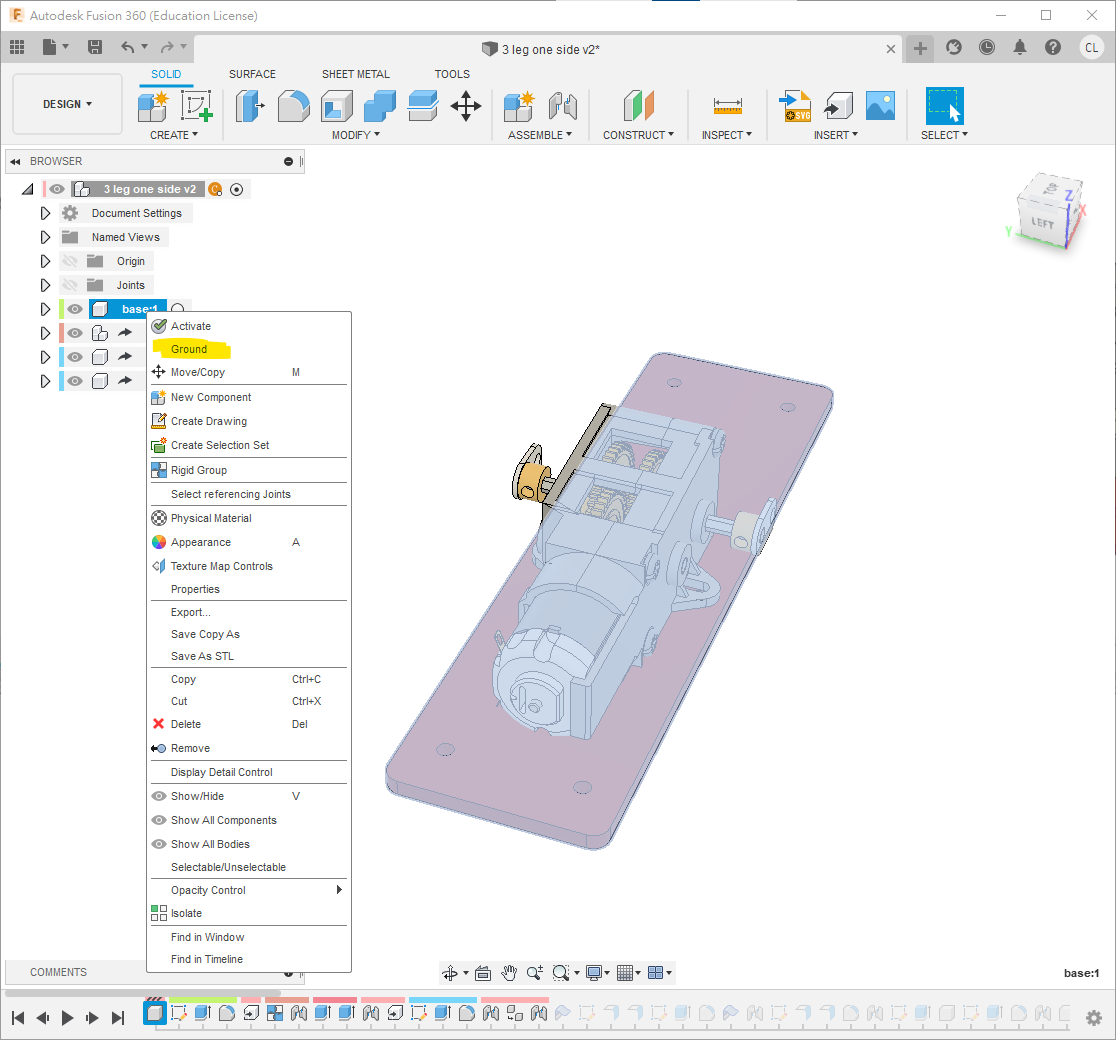
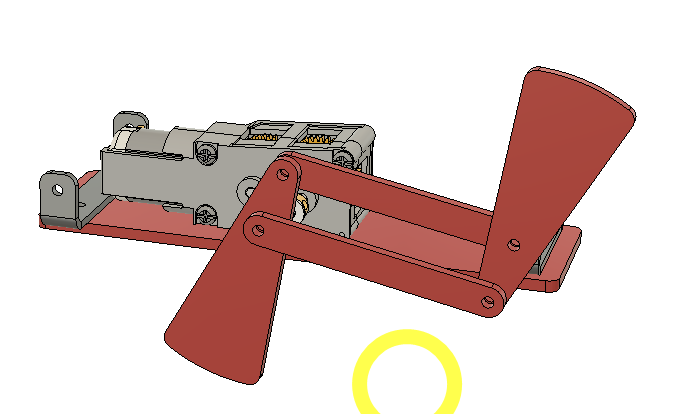
j將曲柄組合到齒輪箱,今次使用rigid joint, 並在最外層component複製貼上組合多一份如圖在component
base按mouse右鍵, 選擇ground將其釘住測試一下兩個曲柄是否同時轉動
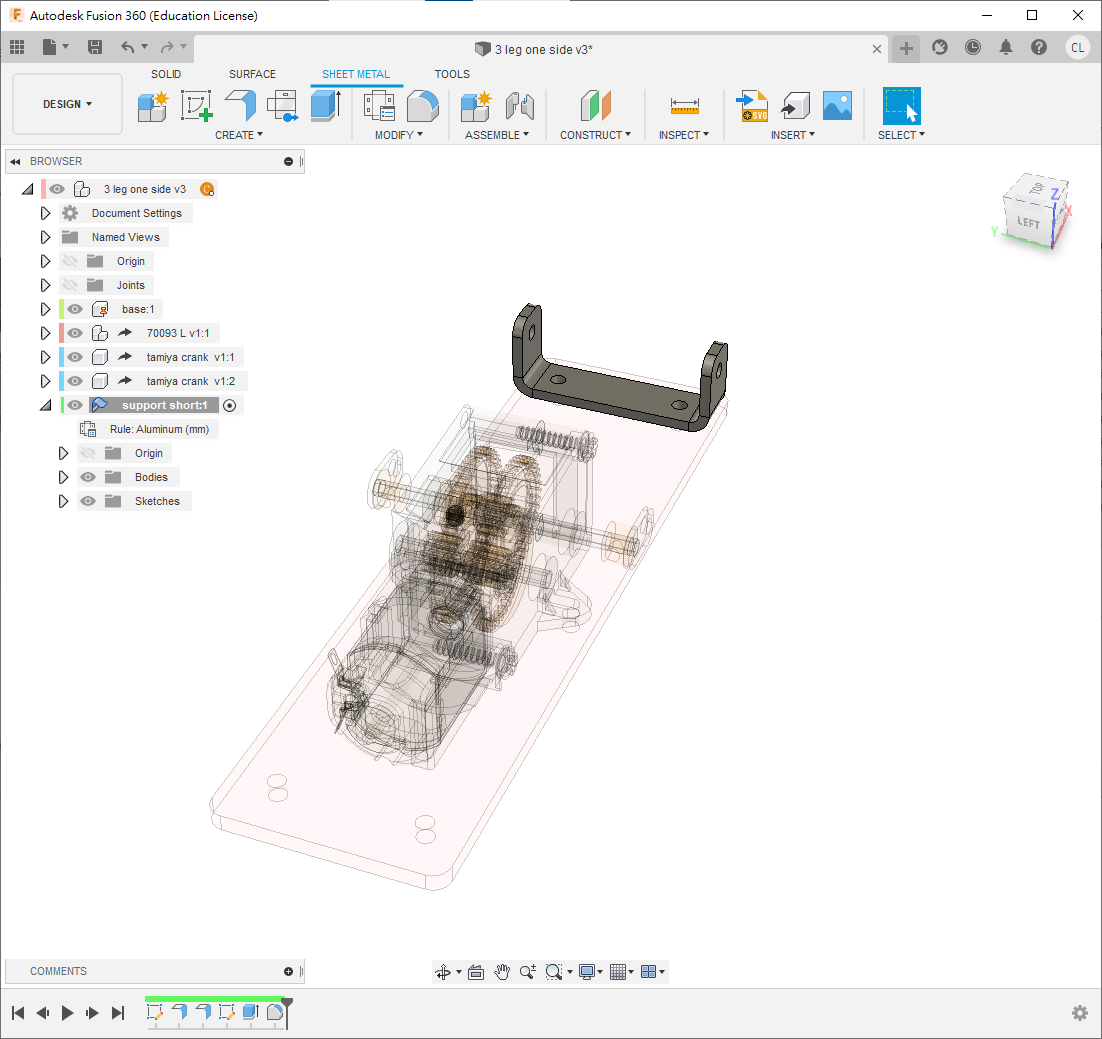
Step 5
開一個新的sheet metal component叫
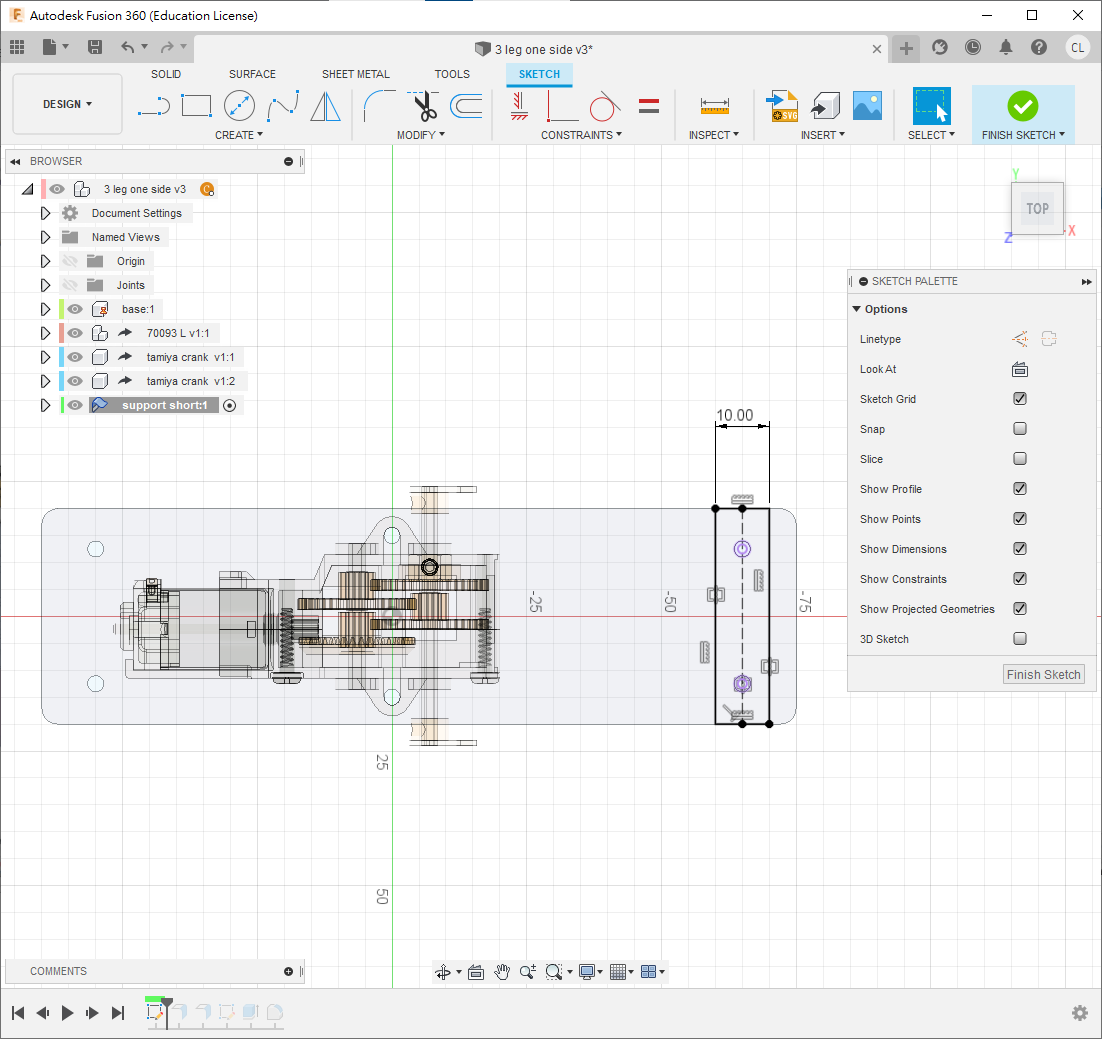
support short(或其他你喜歡的名字)在base的表面開一個新的sketch
用
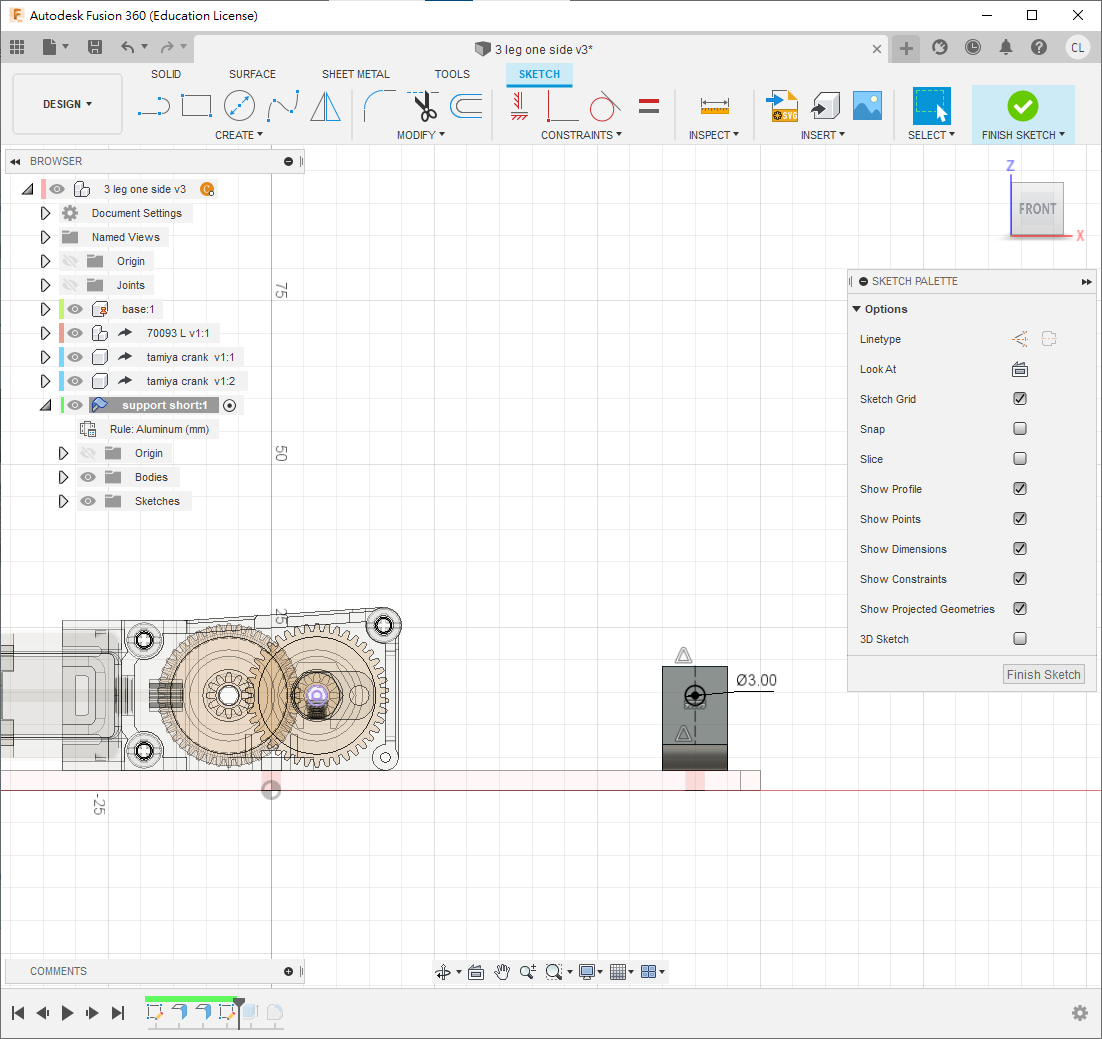
p投影齒輪箱後方的孔投影, 並劃一條中線, 劃一個10mm寬的長方形如下圖到sheet metal頁面,找到
flangeicon, 或直接用s搜尋將長方形用
flange變成2mm厚鋁板(如果事前沒有選擇材料為2mm鋁板, 可以搜尋sheet metal rules更改)
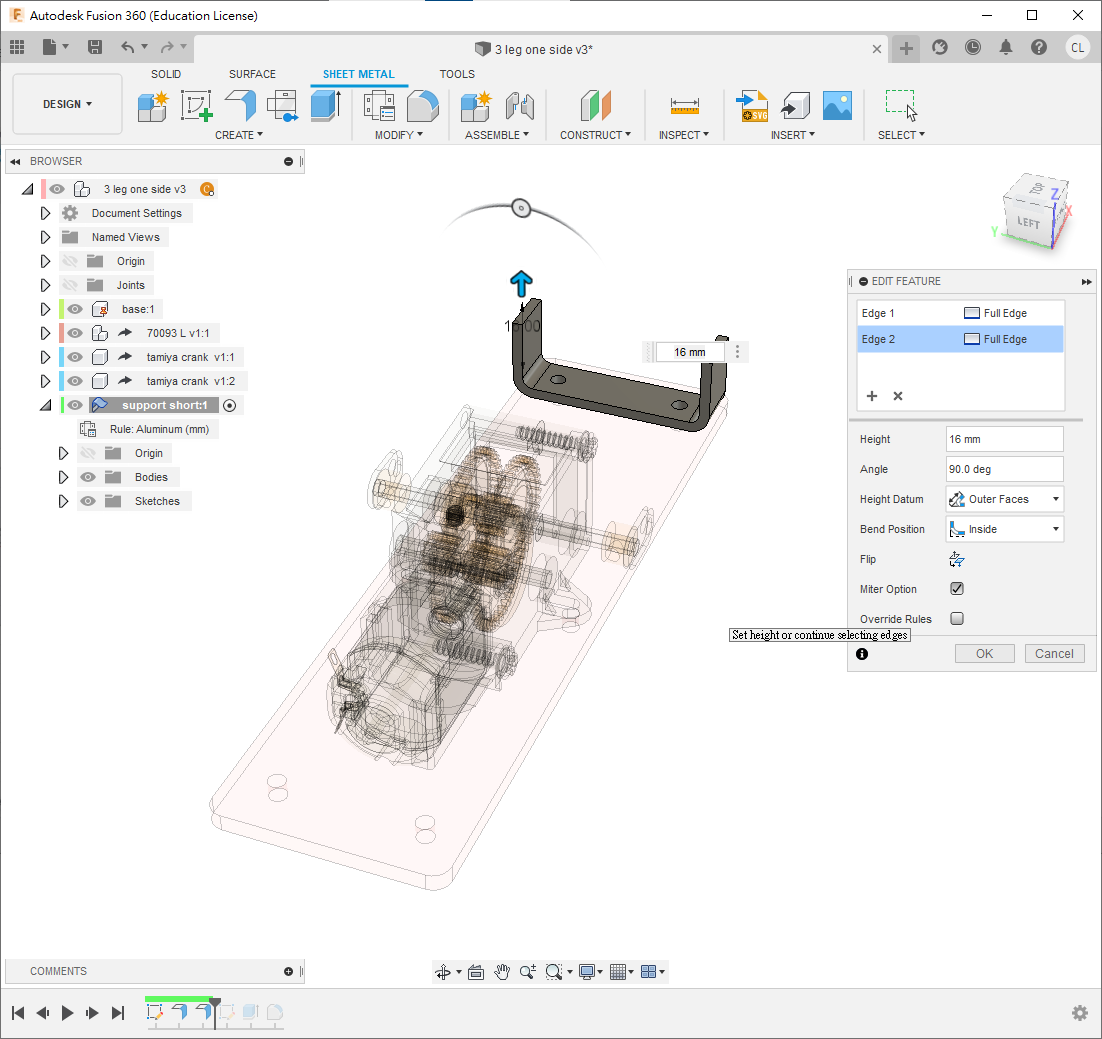
繼續用
flange將鋁板兩邊摺高16mm, 選用outer faces和inside bend position在摺高的鋁板開一個new sketch, 劃一個3mm圓, 高度與齒輪箱的軸齊高
用
e將兩邊穿孔最後fillet 4個角(2mm或3mm皆可)
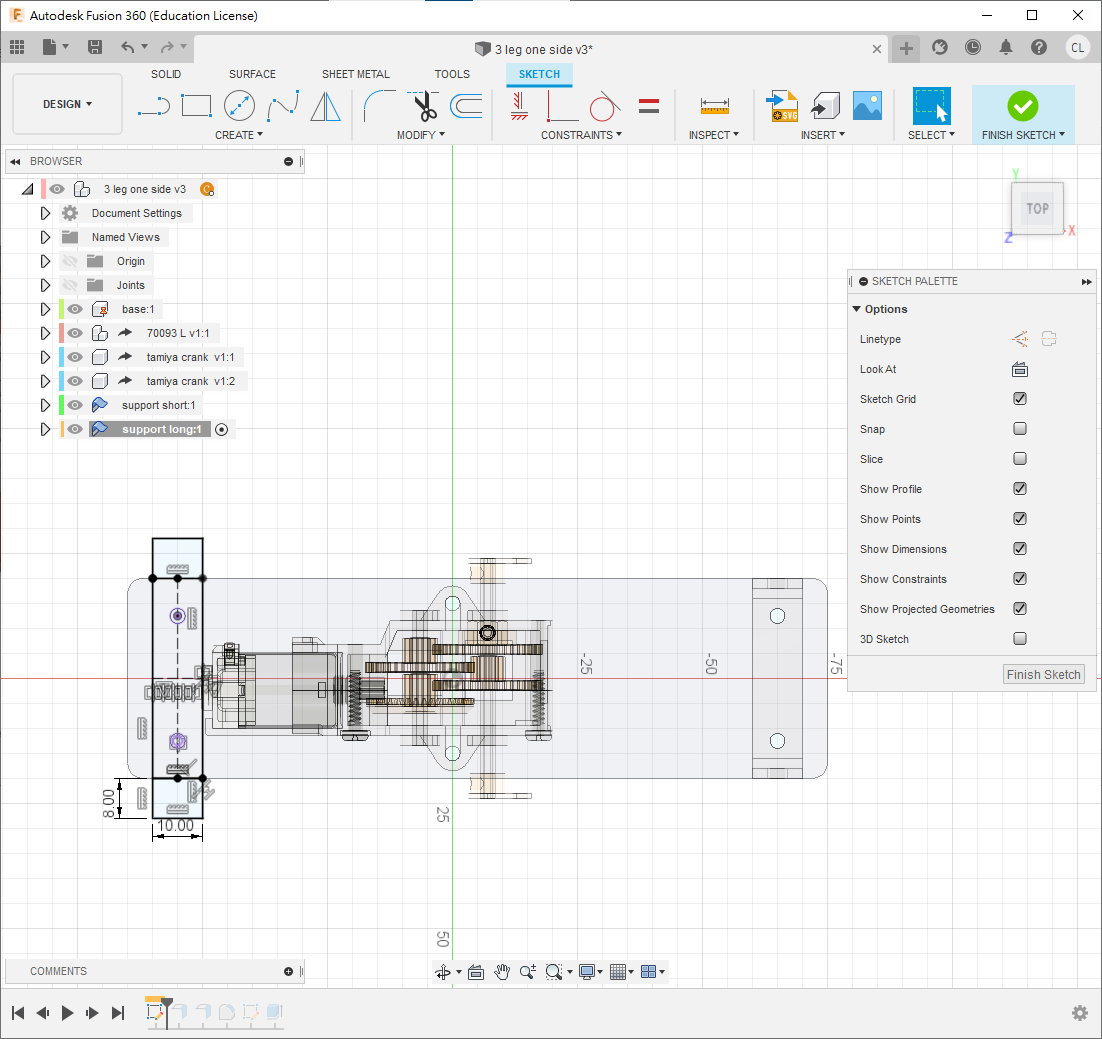
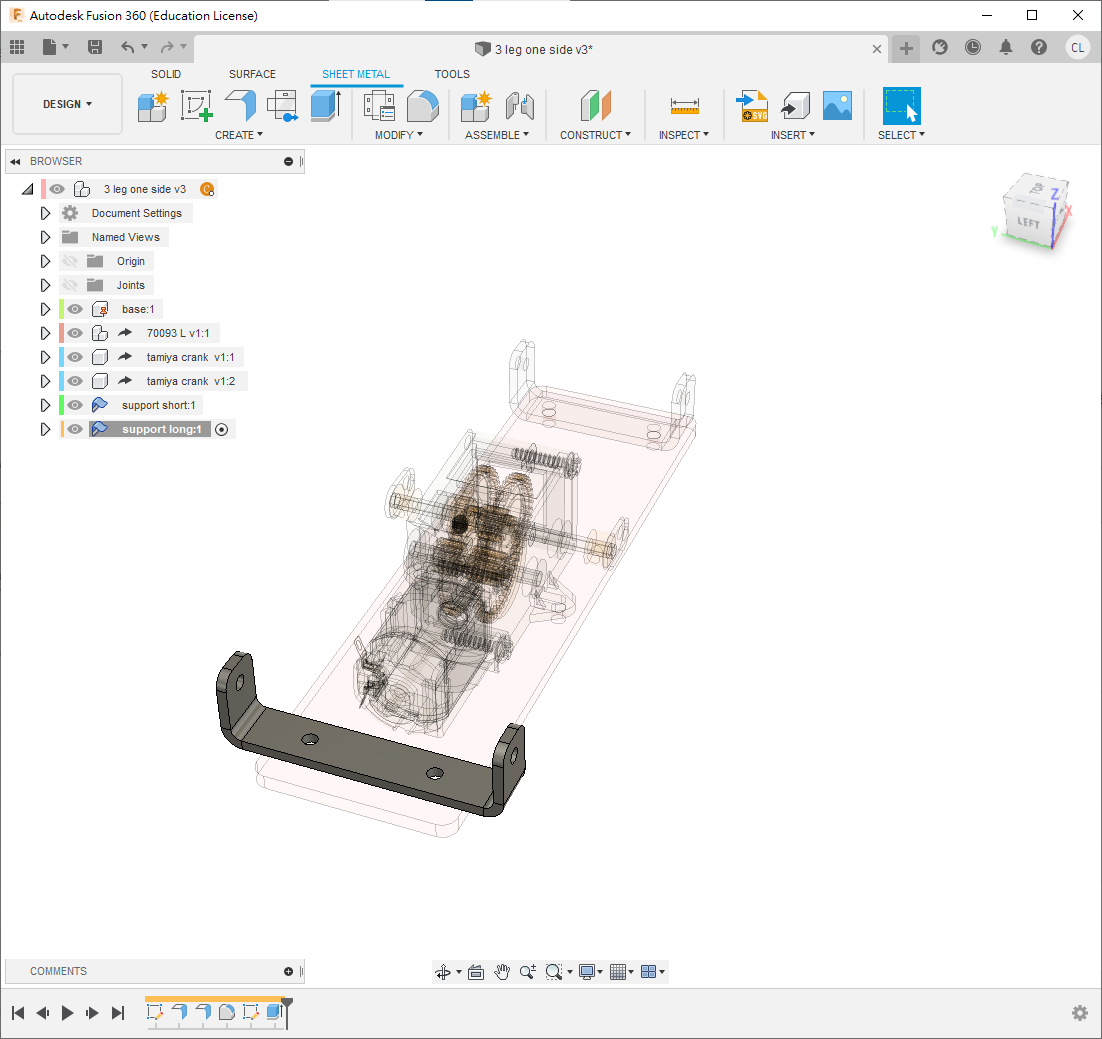
Step 6
下一步, 開另一個新的sheet metal component叫
support long在
base的表面開一個new sketch這次的長方形要加長8mm, 寬一樣是10mm
跟著與step 5一樣, 用flange將長方形變成2mm厚鋁板
鋁板兩邊摺高16mm
在摺高的鋁板上繪畫一個3mm孔, 與齒輪箱的軸同高
兩邊穿孔再將4角fillet 3mm
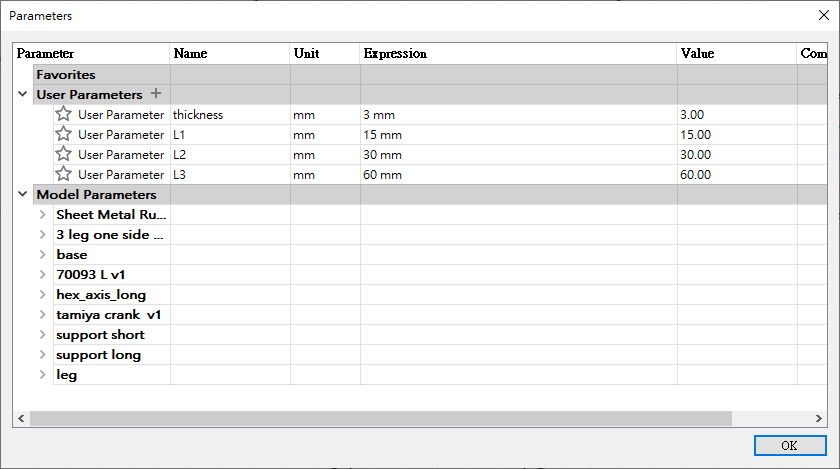
Step 7
用
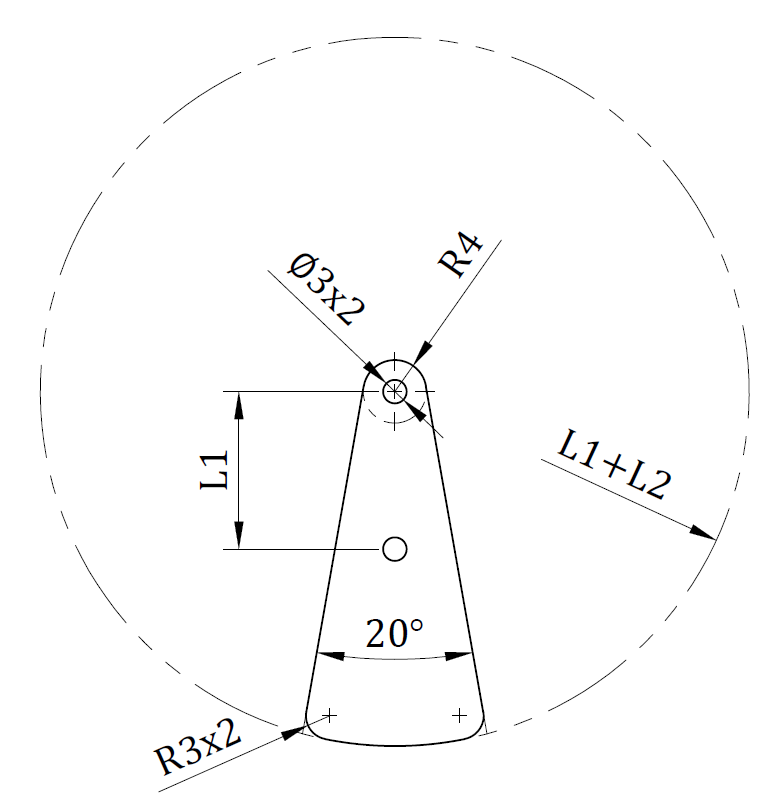
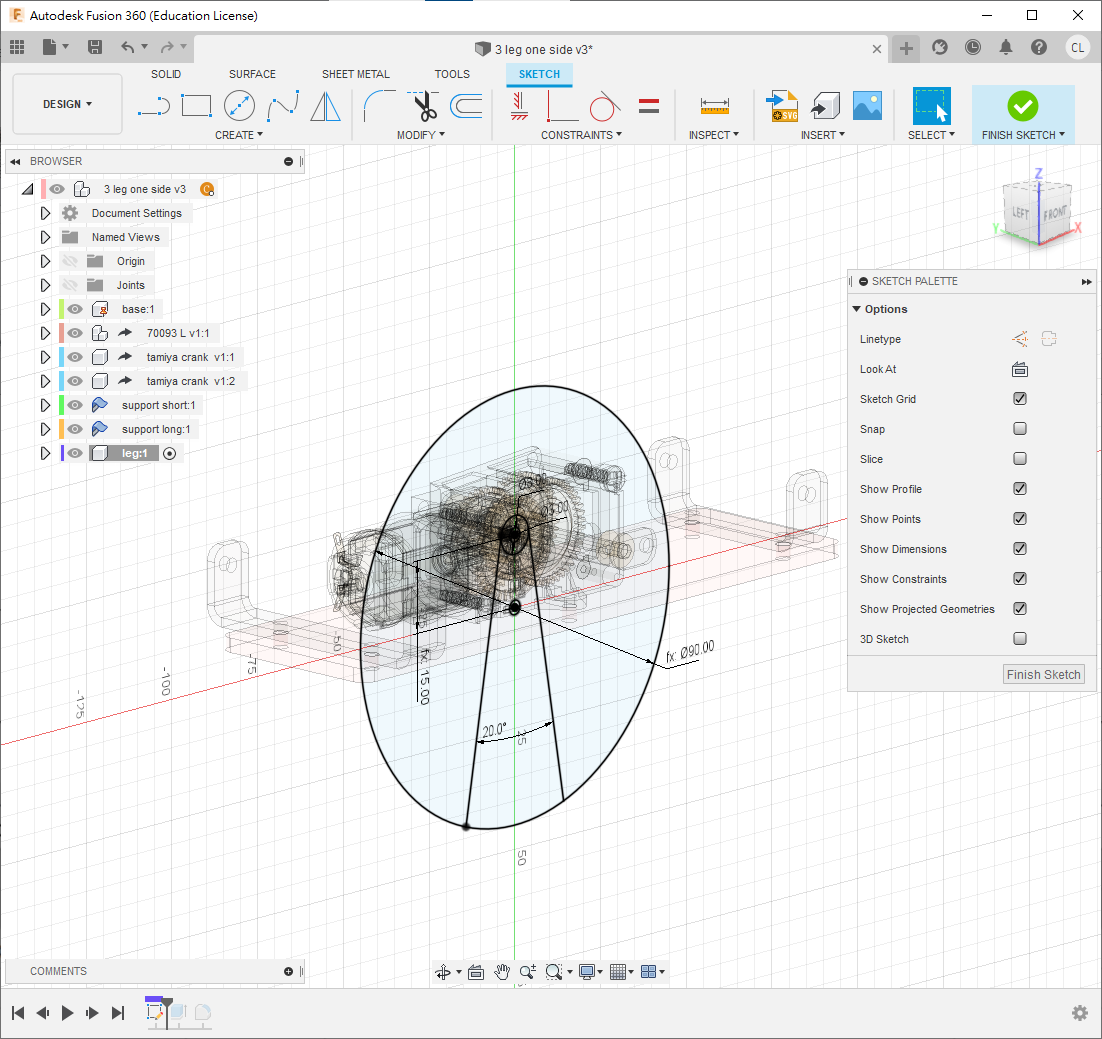
s搜尋"change parameter", 開幾個新的variable如圖在最上層開一個新的standard component叫
leg暫時隱藏其他component, 在xz平面(或者你機械人的側面)開一個new sketch
跟據下圖尺寸繪劃
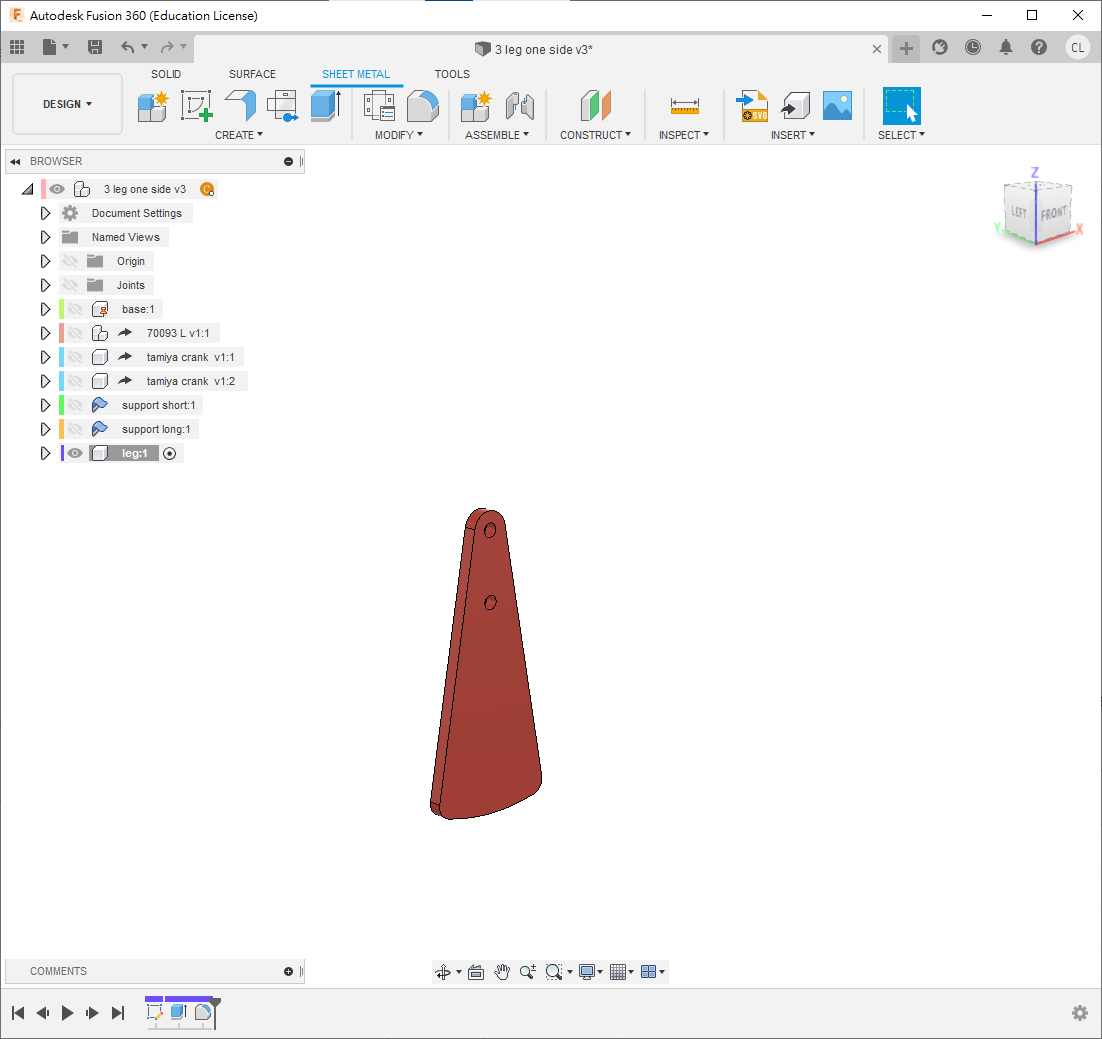
之後用
e擠出thickness的厚度, 腳的角位用ffillet 3mm
Step 8
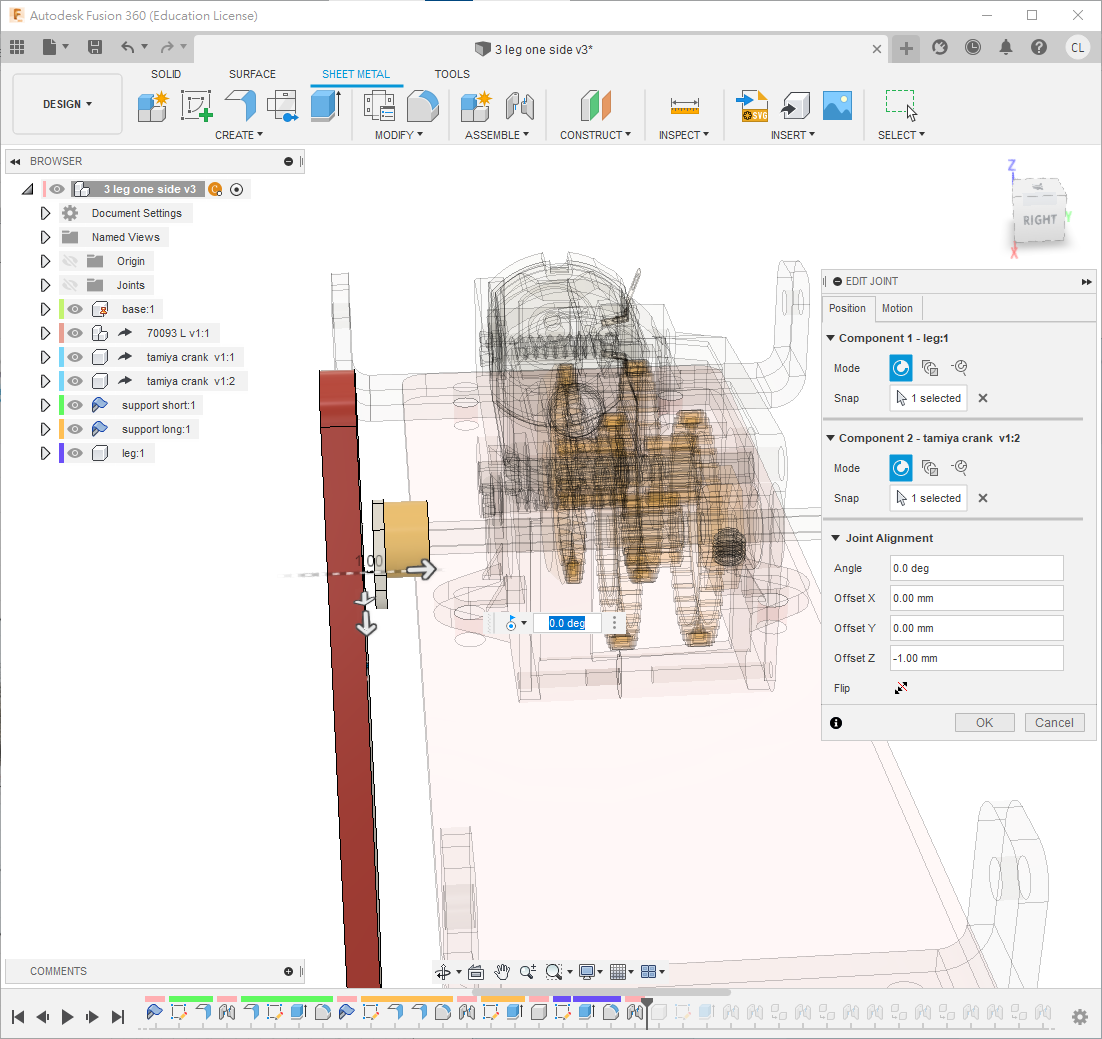
將小黑點褪回最上層, 將其他隱藏的component重新顯示出來
用"j"將腳joint到曲柄的第2個孔
offset z為1mm
選用revolve joint
💡今次不用像上次的walking linkage robot一樣開一個component去裝起全部的腳和連杆, 因為今次想做到
左右對稱, 左右都會動
之後另一邊會再derive去一個新的檔案, 所有joint會自動複製
想大家做多幾次joint去熟習
小黑點褪回最上層, 開一個new component
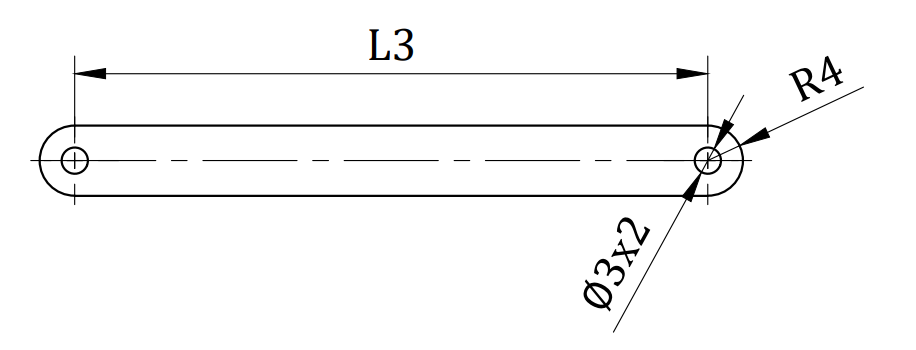
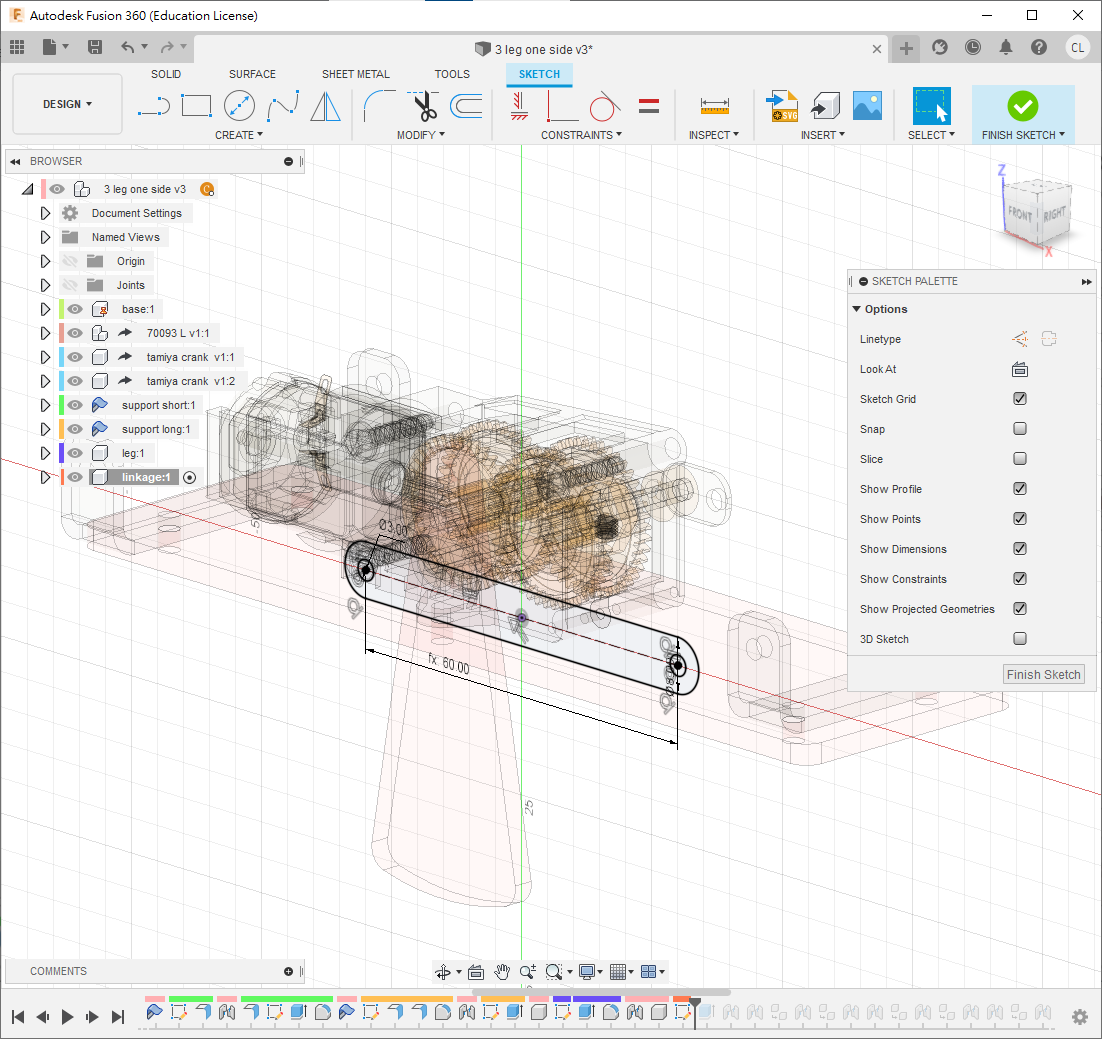
在xz平面(或機械人的側面)開一個new sketch
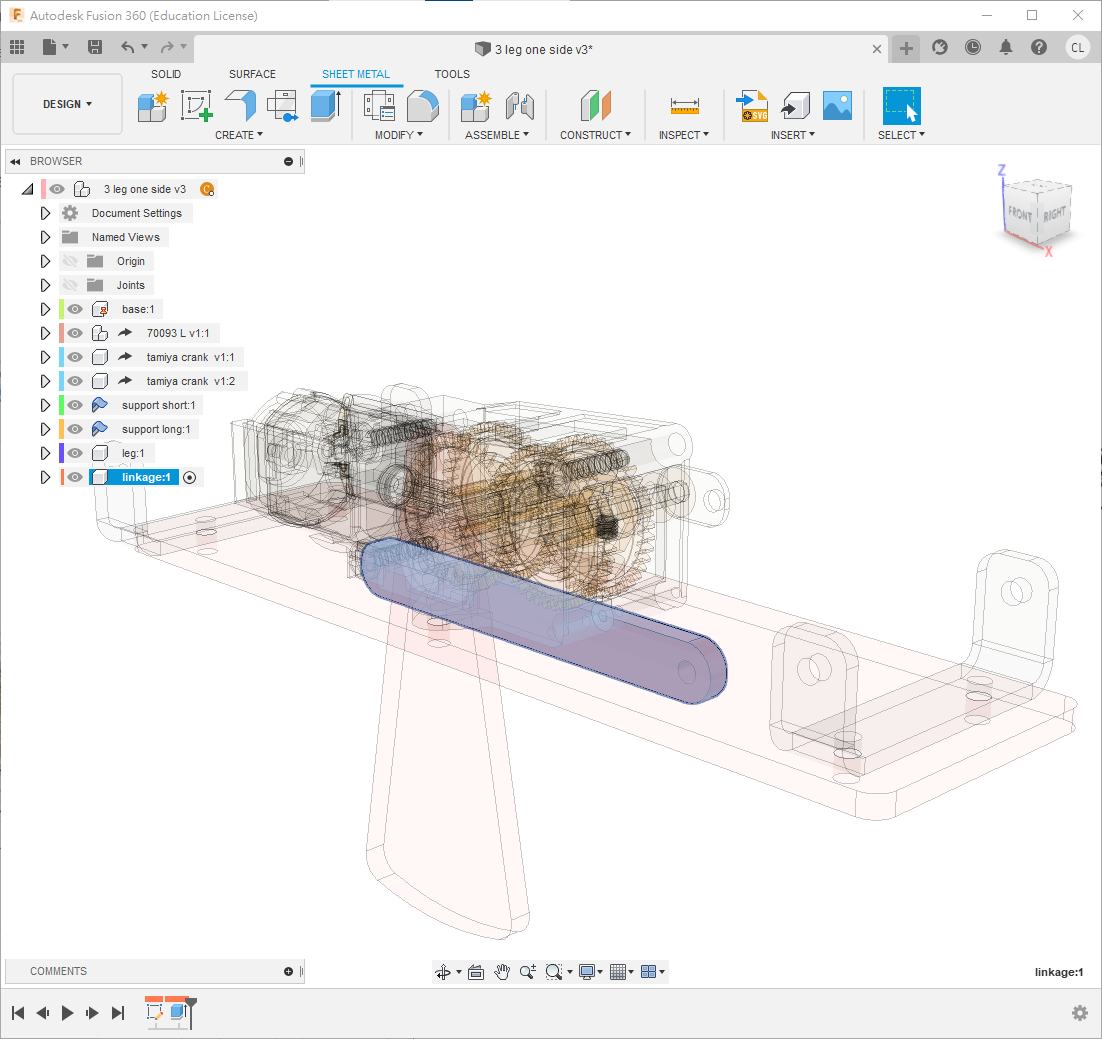
跟據下圖, 繪,劃一條linkage並用"e"擠出
thickness厚度
將linkage的一邊用"j" 組合到腳的後方
間距為1mm
類型選用revolve joint
接著將linkage的另一邊組合到鋁架的孔上
今次不用offset也可以
因為會選用cylindrical joint
💡記著四連杆組合的秘決為: 3個joints 中, 2個revolve joints 1個cylindrical joint, 次序可以隨意, 這樣就不用計算offset的距離和thickness的厚度
Step 9
確保小黑點退回最上層, 將leg和linkage複製一份, 依貼上面2個revolve joints + 1個cylindrical joint的做法, 將其組合成兩足連杆
記得每個連杆和腳之間要間隔1mm
嘗試一下轉動腳, 看看是否能模擬連杆行動
如果有"反臂"的情況如下圖, 貼可以用joint limit來解決(見下)
"反臂"解決方法:
由於較難用文字去描述, 我直接用影片去示範
值得注意, 影片中的角度不一定是絕對, 視乎你joint的時候零件先後可能會不同, 可以將joint顯示出來, 先觀察一下轉動時它的範圍
Step 10
跟著的步驟都是重覆上述
💡記著四連杆組合的秘決為: 3個joints 中, 2個revolve joints 1個cylindrical joint, 次序可以隨意, 這樣就不用計算offset的距離和thickness的厚度
Step 11
接著是做另外半邊的腳
之前已說過, 由於今次希望大家熟習用joint, 又因為要力求對稱, 所以今次要求大家右半邊都要joint一次'
跟之前一樣, 如果出現"反臂"的情況. 可以先將歷史褪行一步, 先調整一下joint的角度, 又或者直接用joint limits
完成後可以儲存
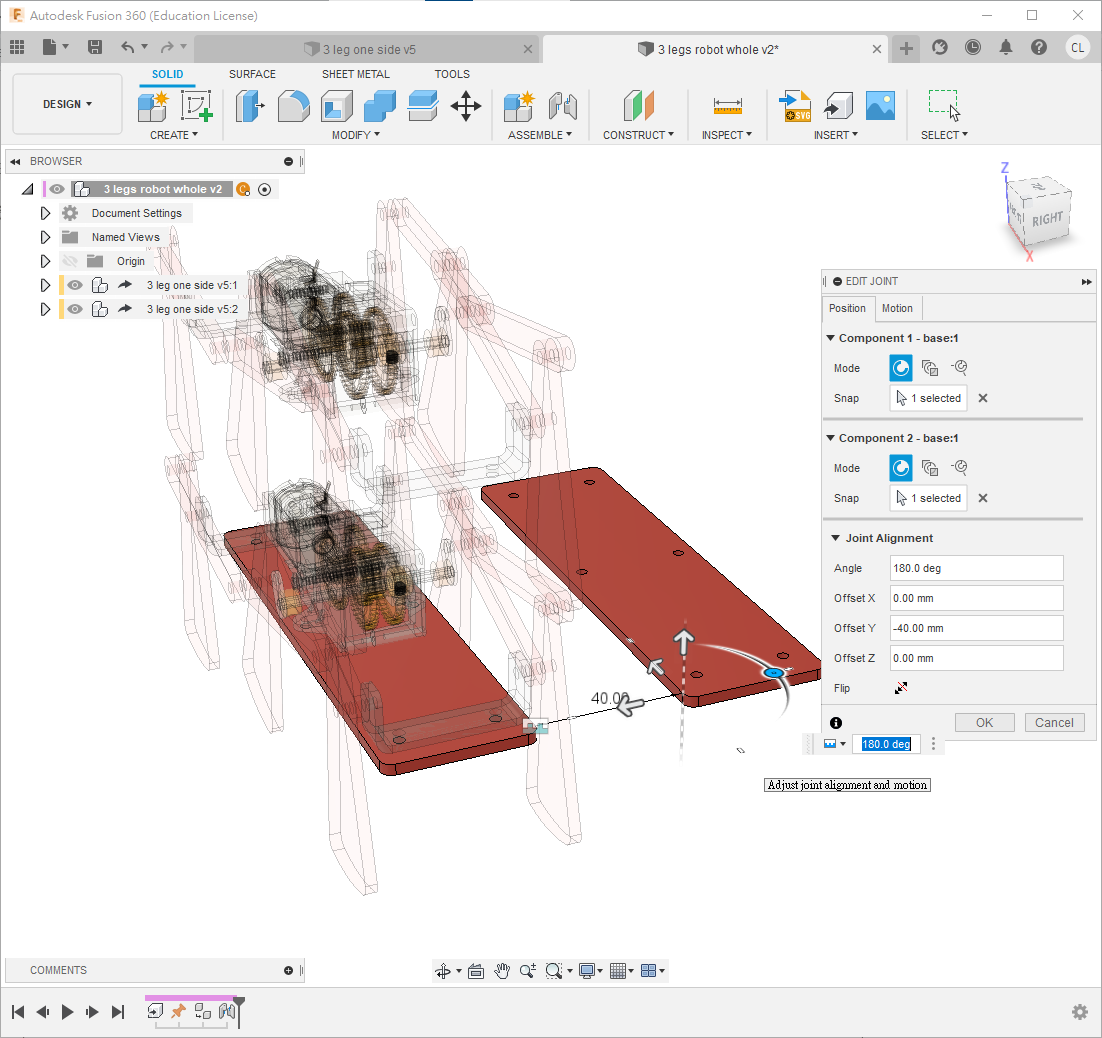
Step 12
開一個新的檔案, 名字可以隨意, 或跟隨用我的檔名都可以
用"insert derive" derive之前所劃的半邊機械人的檔案
將"base"先ground
這時你會發現所有的joint都會保留下來
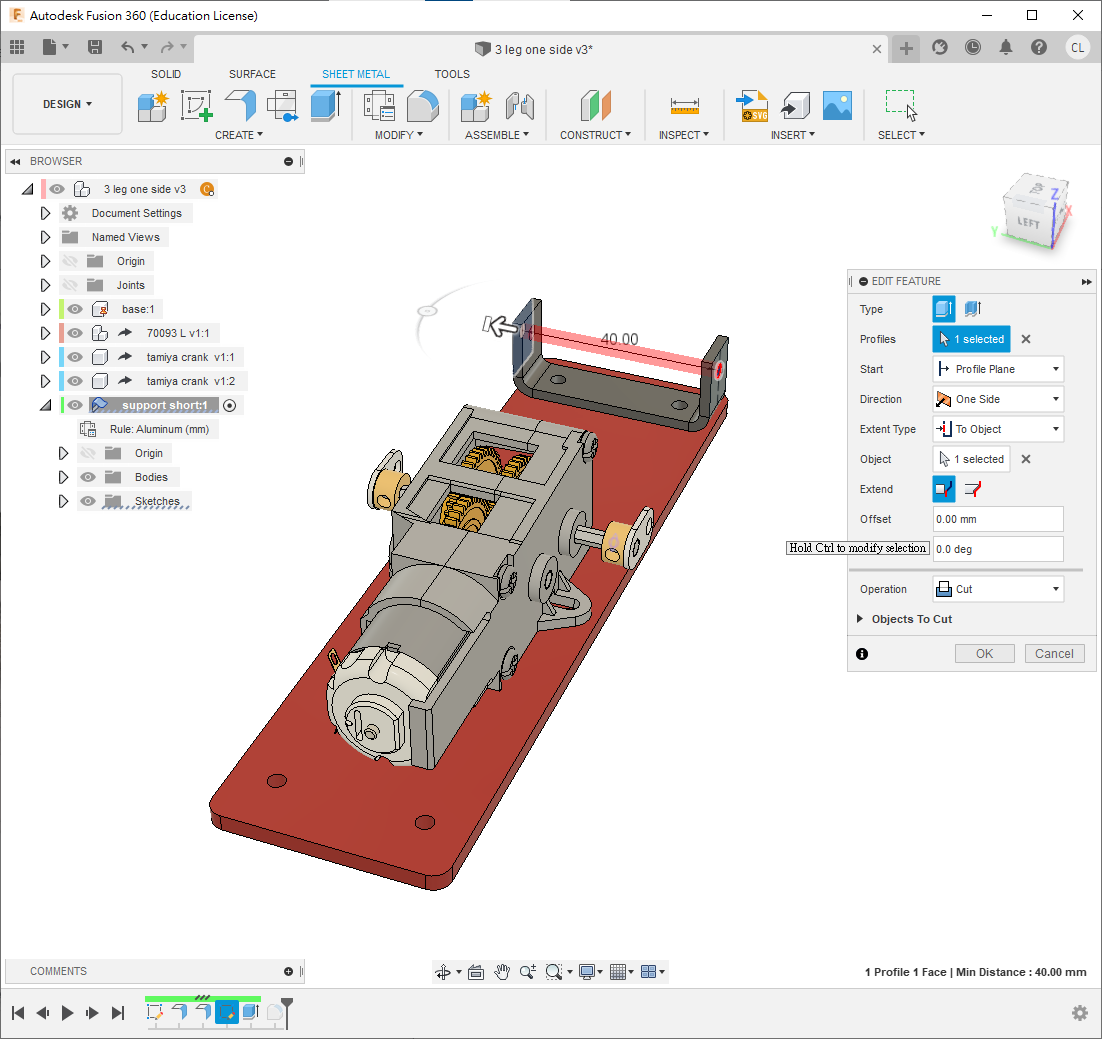
將整個derive複製多一份, 用rigid joint將底板組合, 相距水平40mm (如果真正製作機械人, 則需要加膠板或鋁板將其連接)